라즈베리 파이 4에 ROS 2를 설치해보자. 먼저 이곳을 참조하여 라즈베리 파이에 우분투 20.04를 설치한다.
여기서는 ROS 2 Foxy Fitzroy 버전을 Debian package로 설치하는 방법을 알아본다. 대부분 공식 가이드를 참조하여 복사 붙여 넣기로 진행한다.

Set locale
$ locale# check for UTF-8
$ sudo apt update && sudo apt install locales
$ sudo locale-gen en_US en_US.UTF-8
$ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
$ export LANG=en_US.UTF-8
$ locale# verify settingsSetup sources
$ sudo apt update && sudo apt install curl gnupg2 lsb-release
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Install ROS 2 packages
$ sudo apt update
$ sudo apt install ros-foxy-desktop
$ sudo apt install ros-foxy-rmw-fastrtps*
$ sudo apt install ros-foxy-rmw-cyclonedds*설치 확인
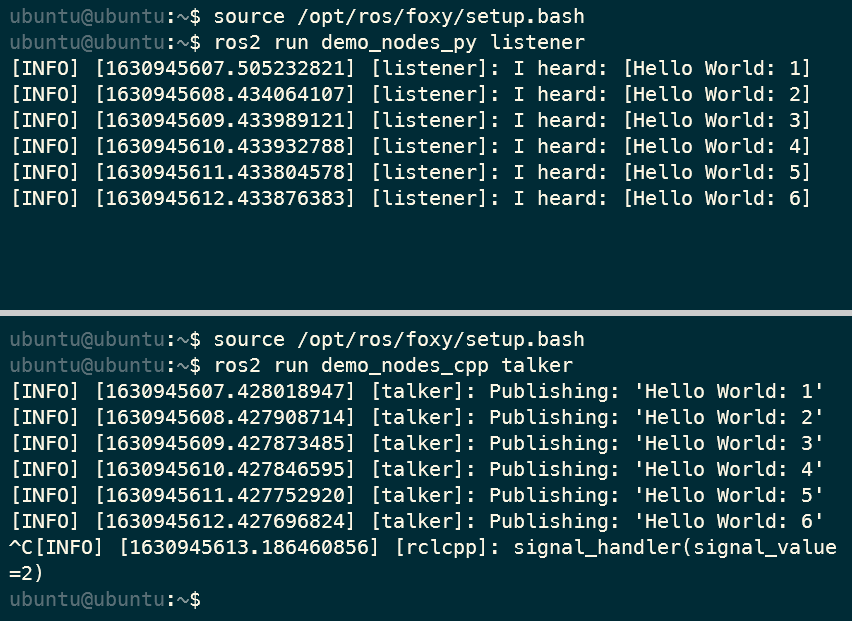
$ source /opt/ros/foxy/setup.bash
$ ros2 run demo_nodes_py listener- 터미널을 추가로 열어 ssh로 라즈베리 파이에 접속한다.
$ source /opt/ros/foxy/setup.bash
$ ros2 run demo_nodes_cpp talker- Talker와 Listener가 잘 동작하는 것을 확인할 수 있다.
설치 삭제 (만약 필요하다면)
$ sudo apt remove ~nros-foxy-* && sudo apt autoremove개발 툴 설치
$ sudo apt update && sudo apt install -y build-essential cmake git libbullet-dev python3-colcon-common-extensions python3-flake8 python3-pip python3-pytest-cov python3-rosdep python3-setuptools python3-vcstool wget
$ python3 -m pip install -U argcomplete flake8-blind-except flake8-builtins flake8-class-newline flake8-comprehensions flake8-deprecated flake8-docstrings flake8-import-order flake8-quotes pytest-repeat pytest-rerunfailures pytest
$ sudo apt install --no-install-recommends -y libasio-dev libtinyxml2-dev libcunit1-dev빌드 테스트
ubuntu@ubuntu:~$ source /opt/ros/foxy/setup.bash
ubuntu@ubuntu:~$ mkdir -p ~/robot_ws/src
ubuntu@ubuntu:~$ cd ~/robot_ws/
ubuntu@ubuntu:~/robot_ws$ colcon build --symlink-install
Summary: 0 packages finished [0.41s]
ubuntu@ubuntu:~/robot_ws$ ls
build install log src- build, install, log, src 폴더가 생성된 것을 확인한다.
환경 설정
매번 새로운 터미널을 열 때마다 "source /opt/ros/foxy/setup.bash"를 입력하는 불편함과 개발하여 설치한 패키지에 대하여 환경 설정을 한다.
$ nano ~/.bashrc아래 내용을 .bashrc 파일에 채워 넣는다.
source /opt/ros/foxy/setup.bash
source ~/robot_ws/install/local_setup.bash'robotics > ROS' 카테고리의 다른 글
| 3DoF Manipulator의 URDF (0) | 2022.03.14 |
|---|---|
| URDF (0) | 2022.03.12 |
| WSL Ubuntu 18.04에 ROS Melodic 설치 (0) | 2022.03.08 |
| ROS2 on the Windows10 with WSL2 (0) | 2021.01.19 |




댓글